Welcome to the Onshape forum! Ask questions and join in the discussions about everything Onshape.
First time visiting? Here are some places to start:- Looking for a certain topic? Check out the categories filter or use Search (upper right).
- Need support? Ask a question to our Community Support category.
- Please submit support tickets for bugs but you can request improvements in the Product Feedback category.
- Be respectful, on topic and if you see a problem, Flag it.
If you would like to contact our Community Manager personally, feel free to send a private message or an email.
Making gravity work
 joseph_newcomer
Member Posts: 101 ✭✭✭
joseph_newcomer
Member Posts: 101 ✭✭✭
in General
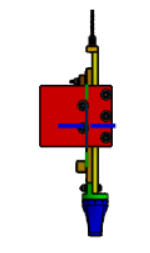
Here's a screenshot of our project.

Essentially, when the brown vertical slider moves up, it catches the yellow slider and lifts it up:

And the goal is that when the brown slider drops, the yellow slider falls down with it by gravity.

The bolt on top lets us add washers to increase the mass if necessary to overcome friction (we use Teflon tape as a "lubricant"). However, in the simulation, when I move the brown slider down, this is what happens:
This is not a surprise, and this question is more from raw curiosity than any specific need: can I make gravity work?
The reason for the double-slider arrangement is so that if there is any interference with the head, instead of being jammed down into the object with considerable force, which could damage the pickup head, the pickup head just moves up out of the way. The objects are very solid, and they would not suffer damage, but the pickup head is 3D-printed plastic, and there's enough force even in the little servo we are using to break parts of it. We could add a camera and a rotating axis, but we want to solve one problem at a time, so this is a "mechanical fuse" (as my ME co-investigator calls it). The version 0.9 design assumes we have a source repository that is well-behaved. It this work well but the open-loop design fails, we will consider a closed-loop design with a camera, but one problem at a time.
Essentially, when the brown vertical slider moves up, it catches the yellow slider and lifts it up:
And the goal is that when the brown slider drops, the yellow slider falls down with it by gravity.
The bolt on top lets us add washers to increase the mass if necessary to overcome friction (we use Teflon tape as a "lubricant"). However, in the simulation, when I move the brown slider down, this is what happens:
This is not a surprise, and this question is more from raw curiosity than any specific need: can I make gravity work?
The reason for the double-slider arrangement is so that if there is any interference with the head, instead of being jammed down into the object with considerable force, which could damage the pickup head, the pickup head just moves up out of the way. The objects are very solid, and they would not suffer damage, but the pickup head is 3D-printed plastic, and there's enough force even in the little servo we are using to break parts of it. We could add a camera and a rotating axis, but we want to solve one problem at a time, so this is a "mechanical fuse" (as my ME co-investigator calls it). The version 0.9 design assumes we have a source repository that is well-behaved. It this work well but the open-loop design fails, we will consider a closed-loop design with a camera, but one problem at a time.
1
Comments
Maybe someone else has suggestions for simulation tools that could do what you're looking for.
Just joking but in all seriousness - has anyone got any workaround to simulate gravity? One way could be to add a force based on the weight of each part in the chosen direction.
As the Simulation module custom library of materials requires the density of the material is there a plan to add gravity in the future?